円筒座標系(えんとうざひょうけい、英: cylindrical coordinate system; 円柱座標系とも)は三次元の座標系であって、点の位置を
- 特別に選ばれた基準軸からの距離、
- 特別に選ばれた基準方向に対する軸から測った方向、
- 基準軸に直交する特別に選ばれた基準平面からの距離
の三者によって決定する。ただし基準平面からの「距離」はその点が基準平面の(表または裏の)どちら側に面するかによって正または負の値を持つものとする。
円筒座標系の原点 (origin) とは、上記三つの座標成分がすべて 0 として与えることができるような点を言う。これは上記の基準平面と基準軸の交点になる。 この基準軸は円筒軸 (cylindrical axis; 円柱軸) や緯線 (longitudinal axis) などと呼ばれ、極軸 (polar axis) とは区別される(極軸あるいは始線とは、基準平面上に載っている半直線で、原点から出てその平面上の基準方向を指し示すものを表すために用いられる)。緯線に垂直な任意の方向を射線 (radial lines; 放射状の直線) と総称する。
円筒軸からの距離は動径距離 (radial distance; 放射距離) や動径 (radius) と呼ばれ、円筒軸周りの偏角座標は角度位置 (angular position) や方位角 (azimuth) などと言う。動径成分と方位角成分を併せて極座標成分 (polar coordinates) と言い、これはその点を通り基準平面に平行な平面上の二次元の極座標系に対応する。第三座標は基準平面を水平面と見るとき高さ (height) や高度 (altitude) と呼んだり、緯度 (longitudinal position) や軸位置 (axial position) などとも言う。
円筒座標系は緯線周りの何らかの回転対称性を持つ物体や現象(例えば、丸い断面を持つ直線パイプを流れる水流や、金属円柱の熱分布、長い真っ直ぐなワイヤー内の電荷から出る電場、天文学における降着円盤など)との関連で有意である。
円筒座標系は「円筒極座標系」("cylindrical polar coordinates") とか「極円筒座標系」("polar cylindrical coordinates") などと呼ばれたりもする。銀河の星の位置を指定するために用いられることもある(「銀河中心的円柱極座標系」("galactocentric cylindrical polar coordinates"))。
定義
与えられた点 P の三つの座標成分 (ρ, φ, z) は以下のように与えられる:
- 軸距離 (axial distance) または動径距離 (radial distance) ρ は z-軸から点 P までのユークリッド距離;
- 方位角 (azimuth) φ は基準平面上の基準方向と原点から点 P の基準平面への正射影へ結んだ直線との間の角;
- 軸座標 (axial coordinate) または高さ (height) z は基準平面から点 P までの符号付き距離。
一意な円筒座標成分
極座標系の場合と同様に、円筒座標 (ρ, φ, z) の点と同じ点を表す同値な座標成分は無数に存在する—具体的に書けば、n を整数として (ρ, φ n×360°, z) および (−ρ, φ (2n 1)×180°, z) は同じ点を表す—(さらに言えば、動径成分 ρ が 0 ならば、方位角は任意にとれる)。
各点に対して座標が一意に定まることが必要となるような場面では、例えば、動径成分は非負 (ρ ≥ 0) で、方位角 φ は360°間隔の特定区間(例えば [−180°, 180°] や [0, 360°] など)に入るなどと約束すればよい。
表記の慣習
円筒座標系の記法は一通りではない。ISO標準規格31-11では (ρ, φ, z) は ρ が動径座標、φ が方位角、z が高さとなるように求めている。しかし動径成分はしばしば r や s と書かれるし、方位角が θ や t と書くこともよくある。もう一つの成分も、高さを h で表したり、円筒軸が水平線と見なされるときには x と書くなど、文脈に依存した特定の文字が任意に用いられる。
具体的な状況において、そして多くの数学的図式化において、偏角成分の正の方向は正の高さを持つ任意の点から見て反時計回りに測るものとする。
座標系の読み替え
円筒座標系は数ある三次元座標系の一つであり、ほかの三次元座標系と以下に述べるような変換公式のもとで読み替えることができる。
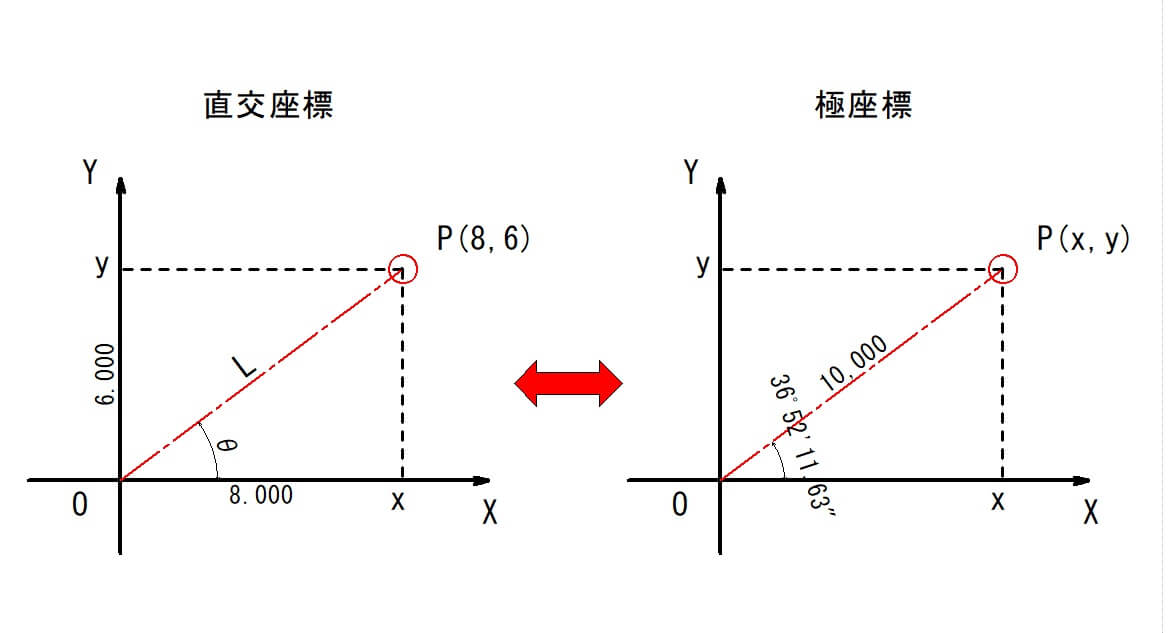
直交座標系
円筒座標系と直交座標系との間の変換は、円筒座標系の基準面を xy-直交座標平面(方程式 z = 0 の表す平面)と見なし、かつ円筒軸を z-直交座標軸と見なすと容易に扱える。こうすれば、両座標系で z-座標は共通になり、円筒座標 (ρ,φ,z) と直交座標 (x,y,z) の間の変換則は二次元の極座標系の場合と同じく および で相互に読み替え可能である。ここで逆正弦函数 arcsin は [−π/2, π/2] = [−90°, 90°] の範囲の角を返す枝をとるものとする。これらの公式から、方位角 φ は [−90°, 270°] の範囲になることがわかる。(他の変換公式は極座標系の項を参照のこと。)
多くのモダンなプログラミング言語には、与えられた x, y から(上記のような場合分けをすることなく)(−π, π) の範囲での正しい方位角 φ を計算する函数が提供されている。
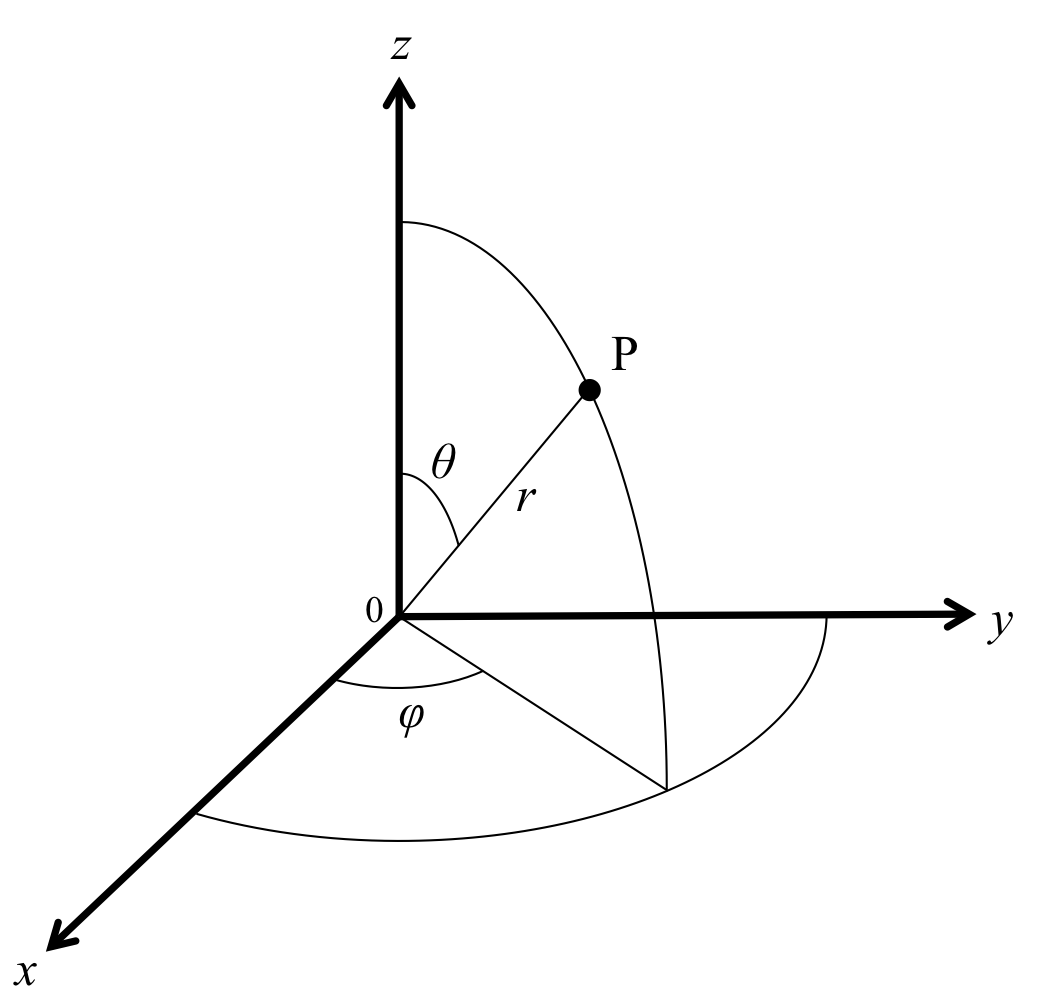
球面座標系
球面座標系 (半径 r, 仰角 (elevation) または傾斜角 (inclination) θ, 方位角 φ) の円筒座標系への変換は
で、円筒座標系から球面座標系への変換は
で得られる。
線素および体積要素
円筒極座標系を含む多くの問題において線素および体積要素がこの座標系でどのように表されるかを知っていることは有意である(それにより曲線経路や体積を含む問題を積分によって解く方法が考えられるようになる)。
- 円筒座標系における線素 は で与えられる。
- 円筒座標系における体積要素は となる。
- 動径成分 ρ が一定となる曲面(垂直円筒)上の面素(面積要素)は になる。
- 方位角 φ が一定の曲面(垂直半平面)上の面素は である。
- 高さ z が一定の曲面(水平面)上の面素は で得られる。
微分作用素のナブラを円筒座標系で表現すれば、以下のように勾配・発散・回転およびラプラス作用素はそれぞれ、 と書くことができる。
円筒調和函数
円筒対称性を持つ系におけるラプラス方程式の解は円筒調和函数と言う。
脚注
注釈
出典
参考文献
- Morse, Philip M.; Feshbach, Herman (1953). Methods of Theoretical Physics, Part I. New York City: McGraw-Hill. pp. 656–657. ISBN 0-07-043316-X. LCCN 52-11515
- Margenau, Henry; Murphy, George M. (1956). The Mathematics of Physics and Chemistry. New York City: D. van Nostrand. p. 178. ISBN 9780882754239. LCCN 55-10911. OCLC 3017486
- Korn, Granino A.; Korn, Theresa M. (1961). Mathematical Handbook for Scientists and Engineers. New York City: McGraw-Hill. pp. 174–175. LCCN 59-14456. ASIN B0000CKZX7
- Sauer, Robert; Szabó, István (1967). Mathematische Hilfsmittel des Ingenieurs. New York City: Springer-Verlag. p. 95. LCCN 67-25285
- Zwillinger, Daniel (1992). Handbook of Integration. Boston: Jones and Bartlett Publishers. p. 113. ISBN 0-86720-293-9. OCLC 25710023
- Moon, P.; Spencer, D. E. (1988). “Circular-Cylinder Coordinates (r, ψ, z)”. Field Theory Handbook, Including Coordinate Systems, Differential Equations, and Their Solutions (corrected 2nd ed.). New York City: Springer-Verlag. pp. 12–17, Table 1.02. ISBN 978-0-387-18430-2
関連項目
- List of canonical coordinate transformations
- Vector fields in cylindrical and spherical coordinates
- Del in cylindrical and spherical coordinates
外部リンク
- Hazewinkel, Michiel, ed. (2001), “Cylinder coordinates”, Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4, https://www.encyclopediaofmath.org/index.php?title=Cylinder_coordinates
- Cylindrical Coordinates Animations illustrating cylindrical coordinates by Frank Wattenberg
- Weisstein, Eric W. "Cylindrical Coordinates". mathworld.wolfram.com (英語).
- cylindrical coordinates - PlanetMath.(英語)